Community Built Modules
Drone Charging Network
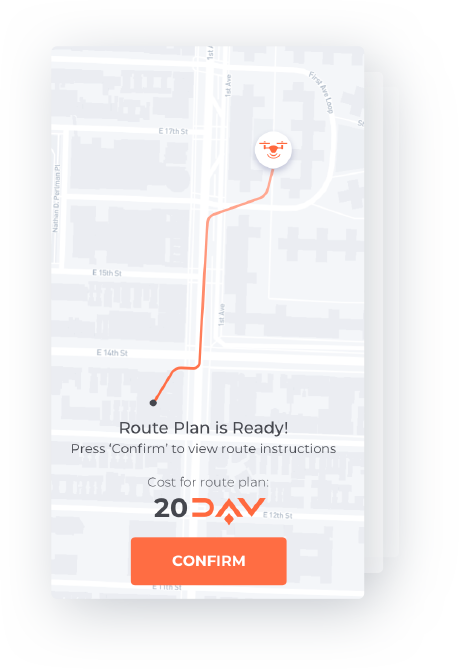
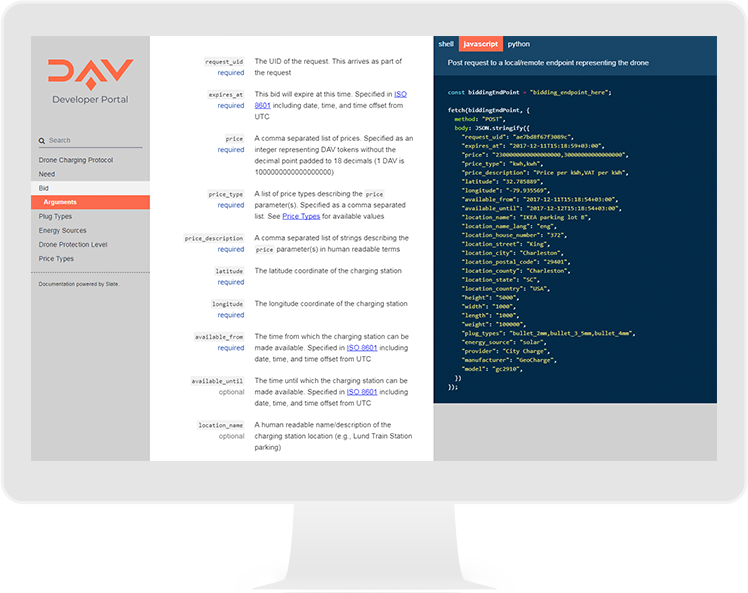
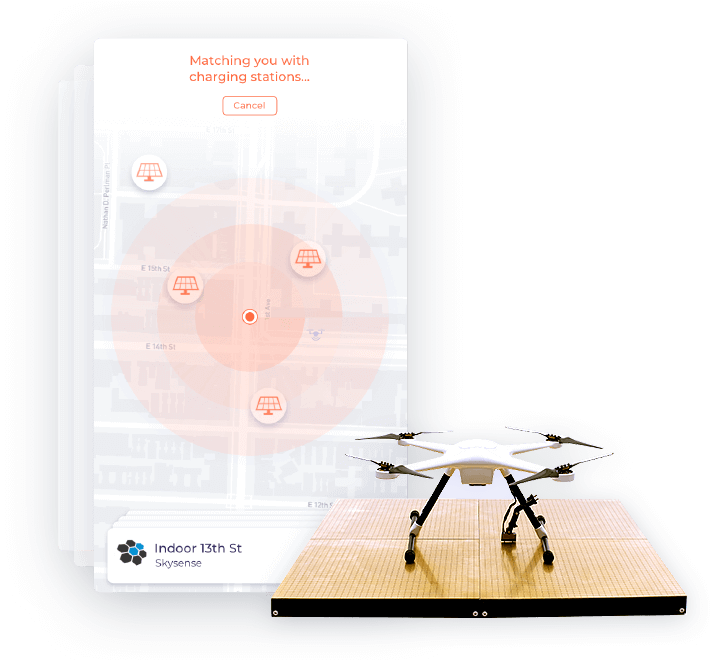
DAV connects drones and charging stations on an open network where they can buy and sell charging services using DAV tokens.
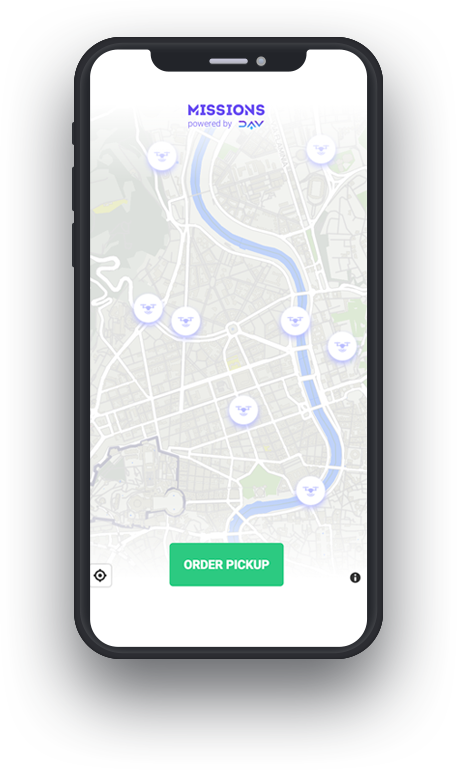
A DAV Alliance member has made available a network of 5 charging stations in northern Italy. These stations offer charging services through the DAV network in exchange for DAV tokens.
View Drone Charging Protocol >>