What We Have Built So Far
Drone Missions App
Missions is the first app built to showcase the DAV ecosystem.
It connects users looking to ship packages with autonomous drones. Users request drone services, drones bid for those services, and trustless cooperation is enabled by using the blockchain.
Current Status: Integration with the first drone partner (Copter Express) is underway.
Go to Missions App >> Visit our Github repository >>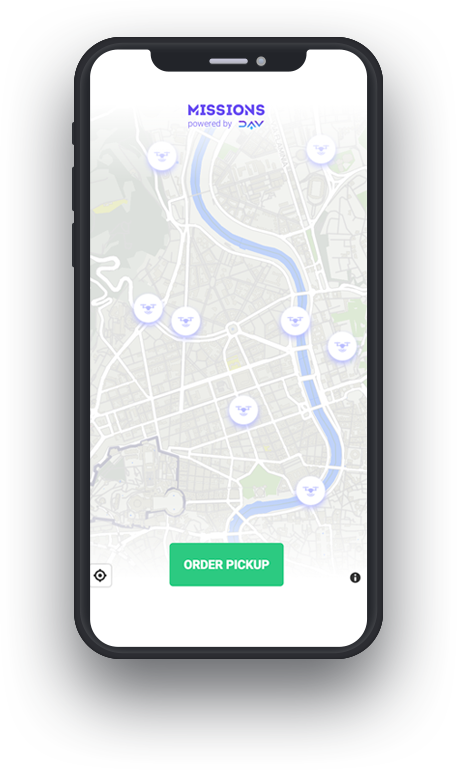

Current Status: Integration with the first drone partner (Copter Express) is underway.
Go to Missions App >> Visit our Github repository >>